私は過去2年間、マサチューセッツ工科大学(MIT)の航空宇宙工学科にて、複数の無人航空機(UAV)による自律協調飛行に関する研究に取り組んできました。災害救助や探索といった現実世界の困難な環境において、複数のUAVが安全かつ効率的に行動するためには、未知環境下での地図構築・軌道計画・衝突回避・通信遅延への対応といった多くの課題を克服する必要があります。私はこれらの課題に対して、アルゴリズムレベルでのアプローチを提案し、実機を用いた検証も行いました。
特に修士時代に開発した「Robust MADER」は、通信遅延が存在する中でも安全な軌道生成を保証する分散・非同期型マルチエージェント軌道計画アルゴリズムです。既存手法の多くは通信遅延がない通信環境を仮定していますが、現実には通信の遅延や喪失は避けられません。本手法では、遅延を考慮した二段階の軌道共有プロトコルと、安全性を検証するDelay Checkを導入し、通信遅延下でも全機体の衝突を完全に回避することに成功しました。本研究はICRA 2023/RA-Lに採択され、ハードウェア実験によりその有効性が実証されました。
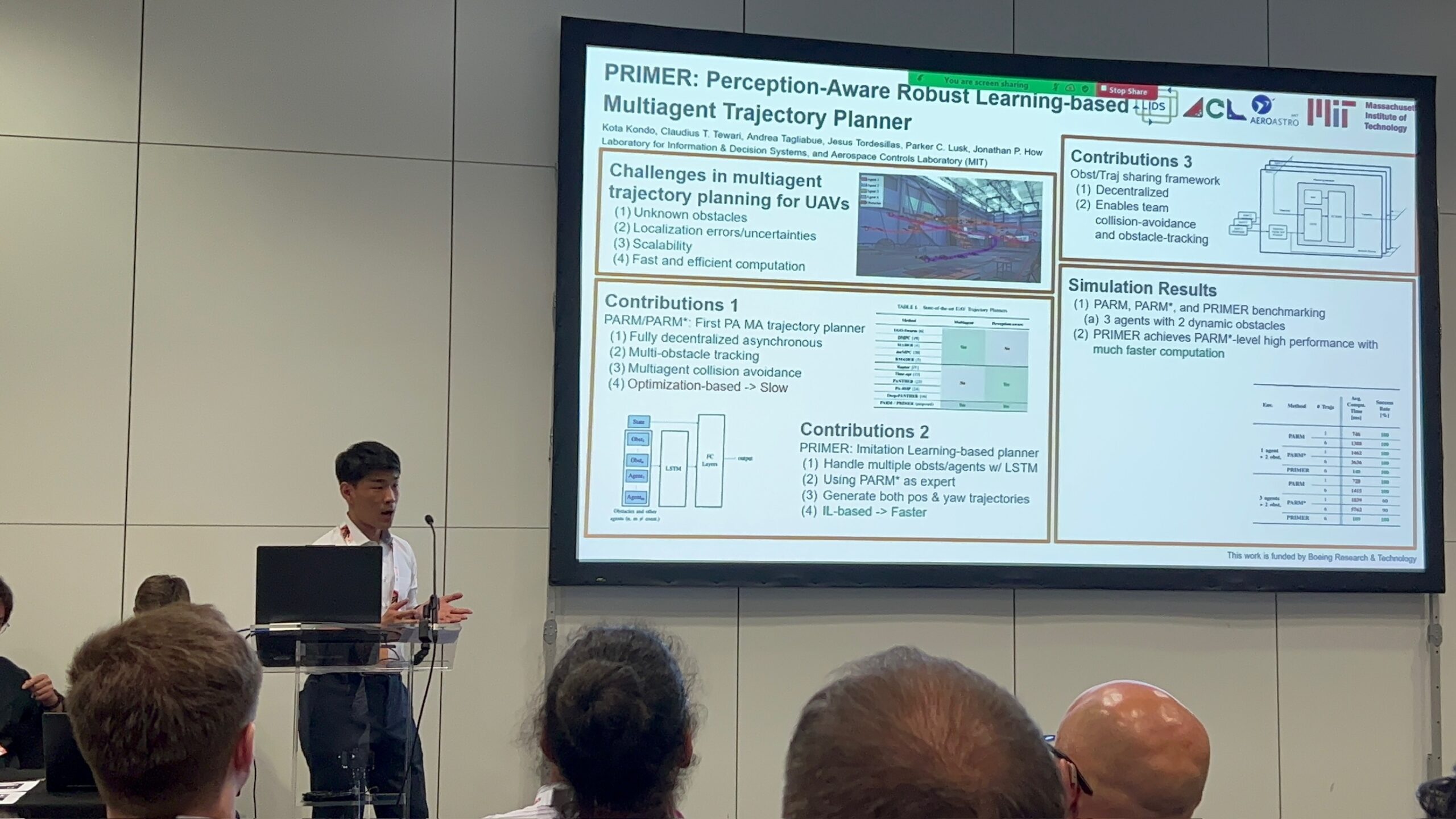
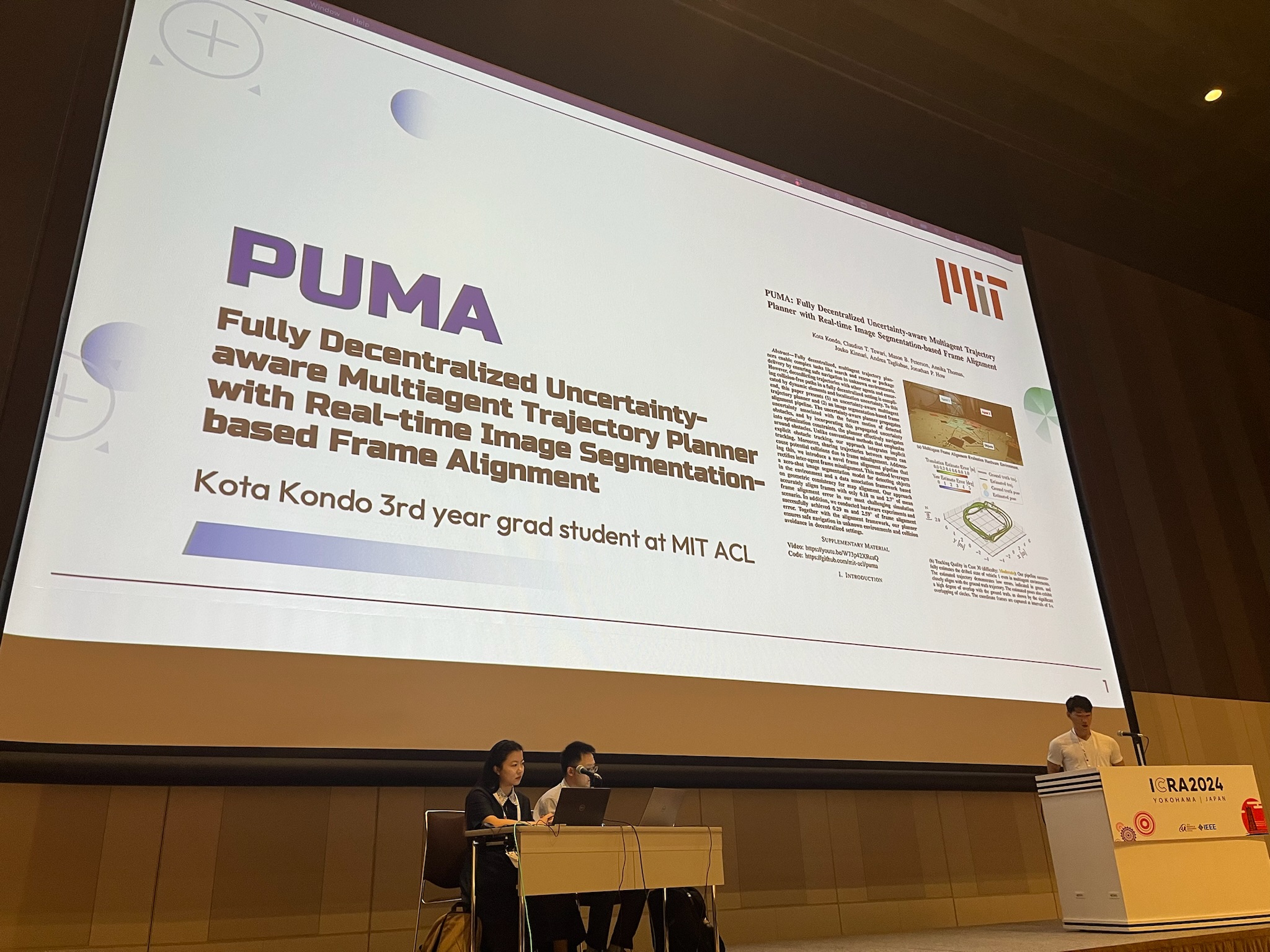
さらに、「PUMA」では、UAVが未知環境で動的障害物を避けながら安全に航行するために、将来の軌道不確実性を考慮した軌道計画手法を開発しました。明示的な障害物追跡を行うことなく、視野内に入れることで自然と障害物を避けるような“暗黙的追跡”を提案しまた。また、各機体が独自の視覚情報と局所座標系を持つ中で、他機体とのフレームずれをリアルタイムで整合させる「画像セグメンテーションベースのフレーム整合パイプライン」も開発しました。この手法は少ない誤差でフレームを一致させ、分散協調飛行の精度と安全性を大幅に向上させました。そして、これをICRA2024で発表しました。
さらに、私たちは大型言語モデル(LLM)の知識を活用した新たなロボット適応制御の手法「REAL」を提案しました。LLMにエラーコードやログ情報を入力として与えることで、軌道追従エラーが発生した場合に補正制御入力を提案させるという構成であり、現実のマルチローター飛行実験において、低レベル制御とミッションレベルの意思決定の両面での適応を実証しました。このように、LLMの「常識」や「言語理解力」を制御工学と統合することを目指し、CDC 2024にて採択されました。
これらの研究は、財団のご支援があってこそ成し得たものです。渡航費や実験費の支援により、国際会議での発表や共同研究が可能となり、世界中の研究者と議論を重ねる中で、自らの研究の位置づけを客観的に理解することができました。
また、研究活動と並行して、2024年に共同創業したスタートアップ「Astark Robotics」では、災害現場で活躍できるマルチUAVシステムの実用化を目指しています。現場のニーズを反映したプロトタイプの開発や実証実験を通じて、アカデミアで得た知識を現実世界に橋渡しすることの難しさと重要性を強く実感しています。
研究以外の面では、MITの学部生の寮で寮監を務め、また日米交流団体であるTOMODACHIプログラムのニューイングランド支部の幹事として活動しました。多様な文化や価値観を持つ人々と協働する中で、他者を理解する努力の大切さを学びました。こうした経験を通じて、研究だけでなく人間としても大きく成長できたと感じています。

最後に、これから海外での研究や挑戦を目指す後輩の皆さんへ。「失敗を恐れず、まずやってみる」という姿勢がとても重要だと過去数年で実感しました。結果は入念な準備と大胆な行動力が運よく環境にフィットすると生まれるものだと思います。自分も引き続き、情熱と初心を忘れずに研究と社会実装の両輪で挑戦を続けていきたいと思います。